
Seguimiento del progreso del Rover de la curiosidad del Laboratorio de Ciencias de Marte
Seguimiento del progreso del Rover de la curiosidad del Laboratorio de Ciencias de Marte mientras atraviesa el cráter Gale a su destino de Monte Sharp.
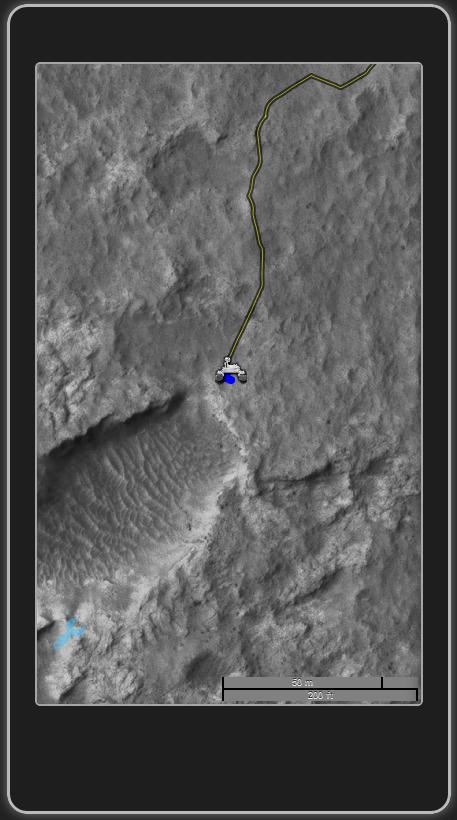
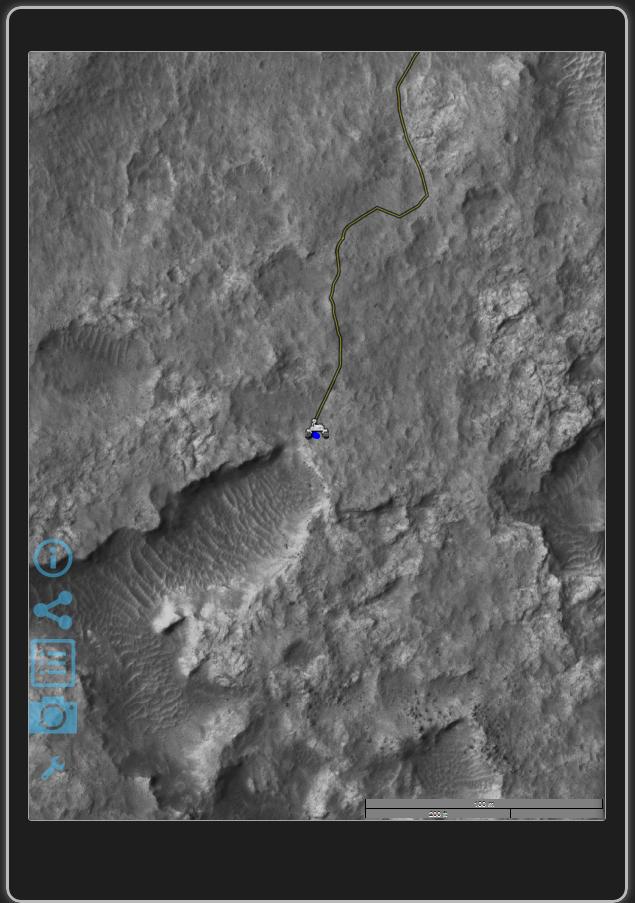
La posición actual se muestra en un mapa de alta resolución (0.25 metros/píxeles) hecho de imágenes de la cámara Hirise en el Orbitador de reconocimiento de Marte. El mapa se puede acercar y arrastrar con gestos táctiles. Una barra de escala muestra la escala de distancia en cualquier nivel de zoom.
La pista del rover desde el sitio de aterrizaje hasta su última posición informada se indica en el mapa. La posición de la posición del rover y la información de la pista se actualizan aproximadamente dos veces al día.
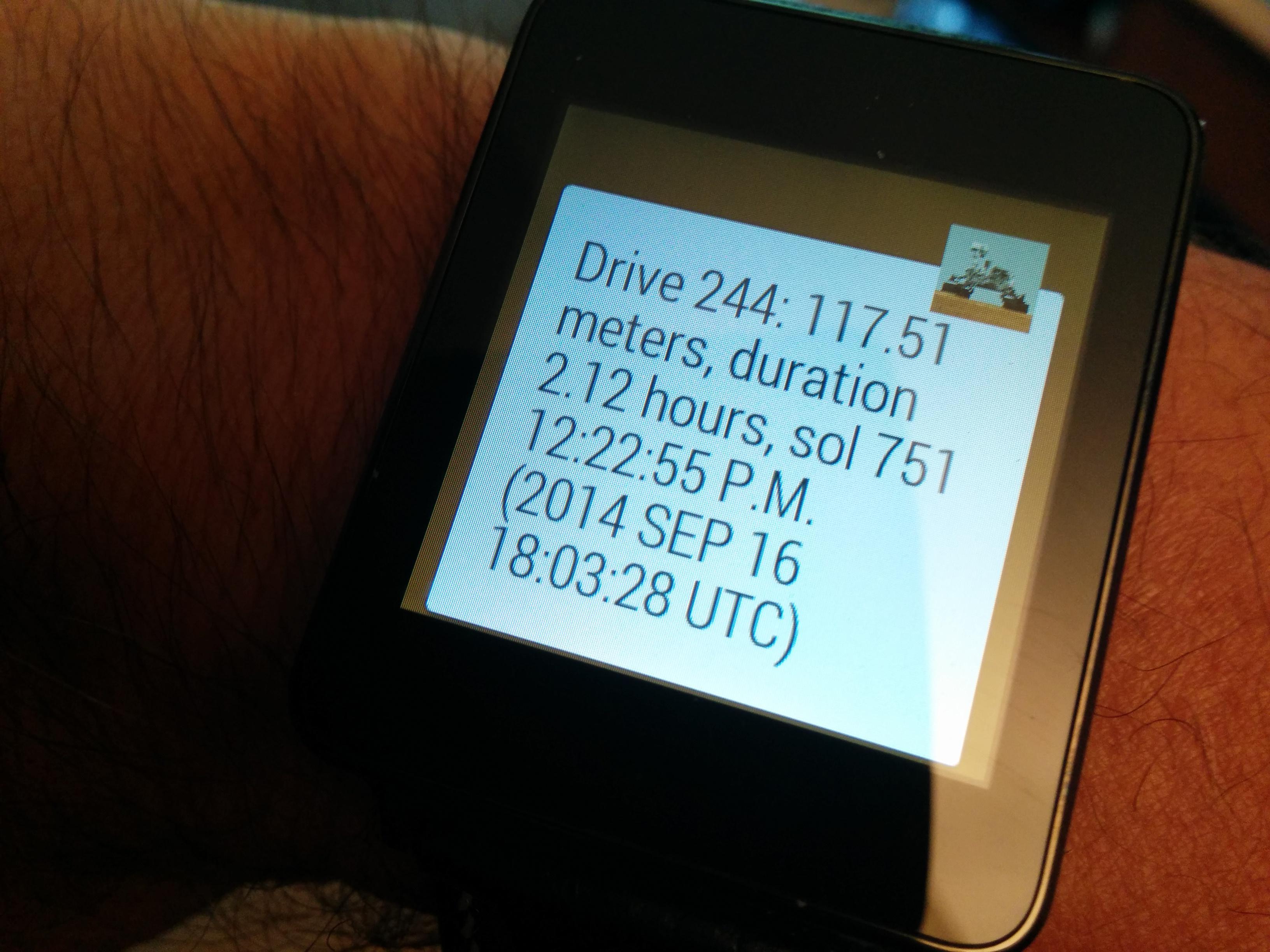
Los enlaces se proporcionan a las páginas web con una lista de todas las unidades en la misión junto con mapas de esas unidades, así como las últimas imágenes tomadas por las cámaras del rover.
© 2014 Joe Knapp [email protected]
Datos de posición del rover de la NASA/NAIF
Imágenes de HiRise (NASA/JPL/University of Arizona/Malin Space Science Systems)
Imágenes de baja resolución por Marte Reconocimiento Orbitador CTX y Orbitadores de Marte anteriores
Azulejos de Layers Open de Maptiler/GDal2Tiles, Klokan Petr Pridal, GDAL y Osgeo
V1.3:
Actualiza la pista para nuevas unidades si la aplicación ya está abierta
 Download(4.86MB)
Download(4.86MB)