
화성 과학 실험실 호기심 로버의 진행 상황 추적
화성 과학 실험실 호기심 로버의 진행 상황을 추적하여 게일 크레이터를 마운트 샤프 목적지로 가로 지르십시오.
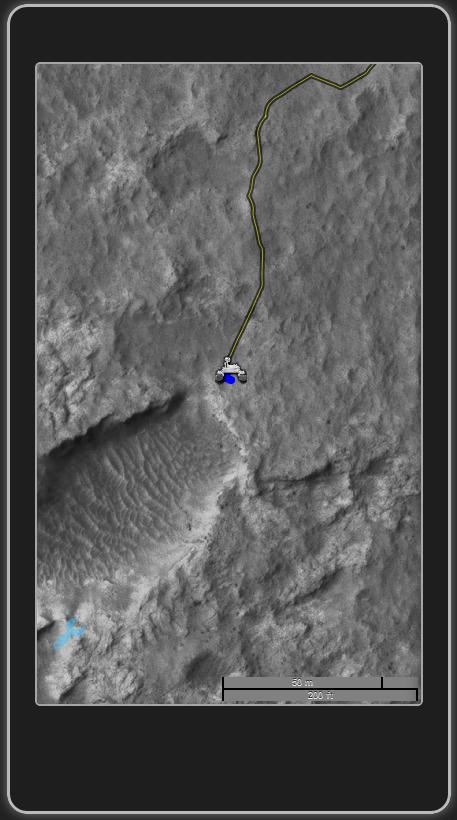
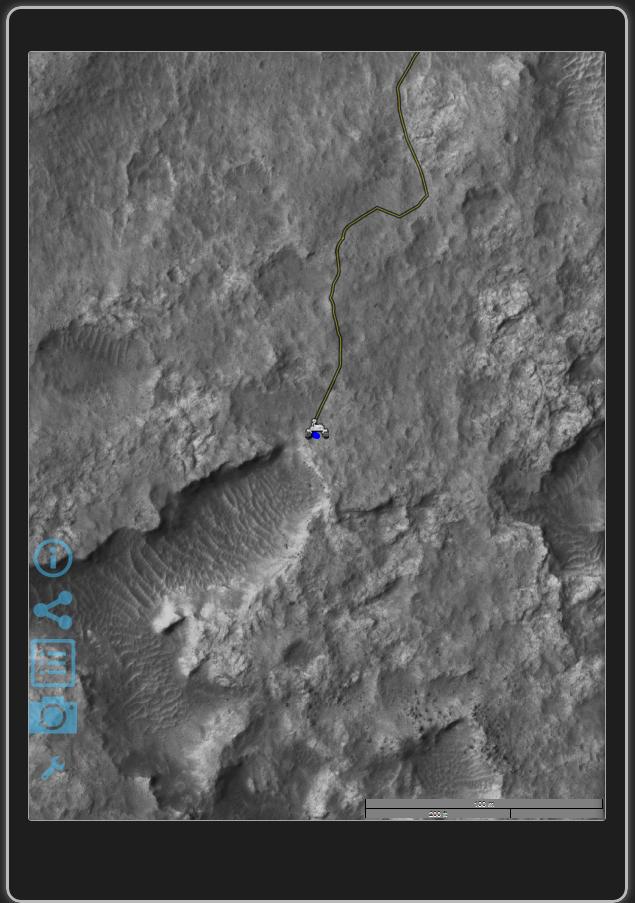
현재 위치는 MARS Reconnaissance Orbiter의 Hirise Camera의 이미지로 만든 고해상도 (0.25 미터/픽셀) 맵에 표시됩니다. 지도를 확대하고 터치 제스처로 드래그 할 수 있습니다. 스케일 막대는 모든 줌 레벨에서 거리 스케일을 보여줍니다.
착륙장에서 마지막보고 위치로 로버의 트랙은지도에 표시됩니다. 로버 위치 및 추적 정보는 약 2 회 하루에 업데이트됩니다.
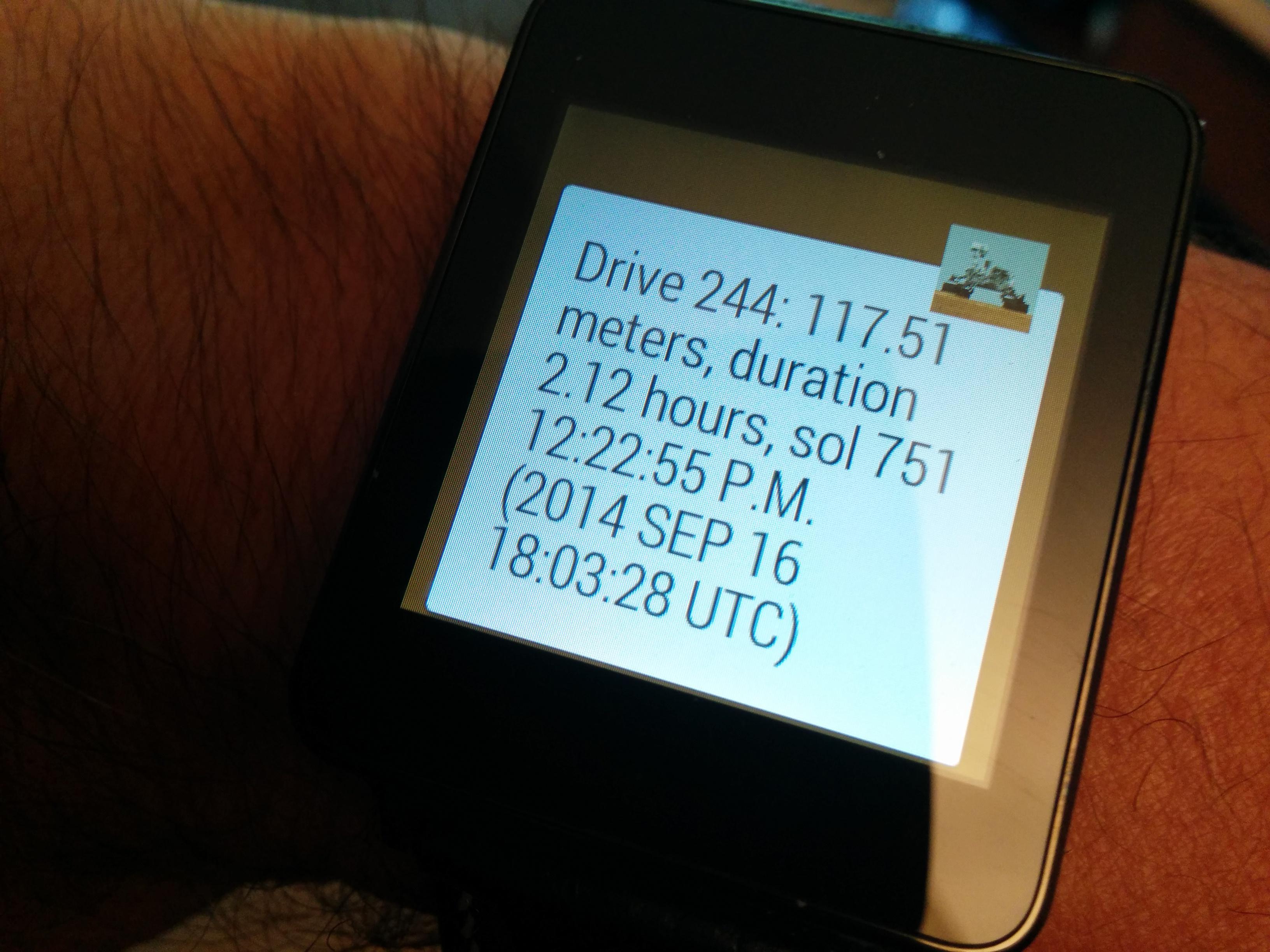
링크는 웹 페이지에 미션의 모든 드라이브 목록과 해당 드라이브의지도 및 로버 카메라가 찍은 최신 이미지와 함께 제공됩니다.
© 2014 Joe Knapp [email protected]
NASA/NAIF의 로버 위치 데이터
HIRESE의 Hi-Res Mars 이미지 (NASA/JPL/University of Arizona/Malin Space Science Systems)
Mars Reconnaissance Orbiter CTX 및 이전 Mars Orbiters의 저해 이미지
Maptiler/Gdal2tiles의 OpenLayers 타일, Klokan Petr Pridal, Gdal & Osgeo
v1.3 :
앱이 이미 열려있는 경우 새 드라이브에 대한 업데이트 트랙
 Download(4.86MB)
Download(4.86MB)