
火星科学研究所の好奇心の進歩を追跡する
火星の科学研究所の好奇心の進行を追跡し、ガールクレーターを鋭い目的地まで横断します。
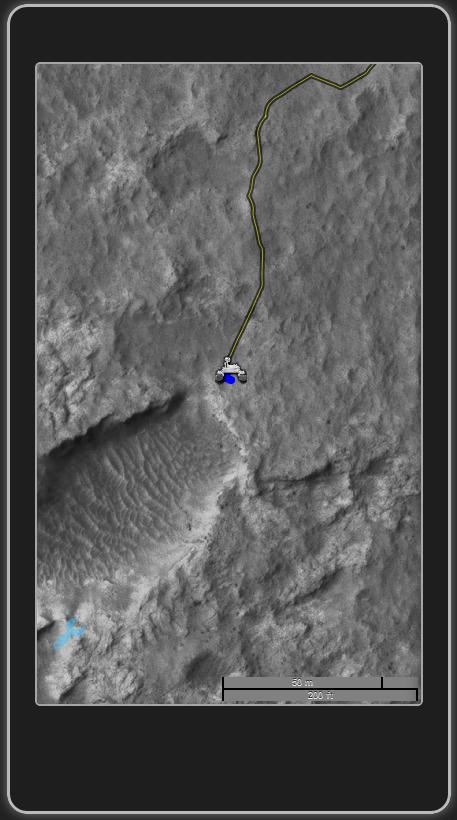
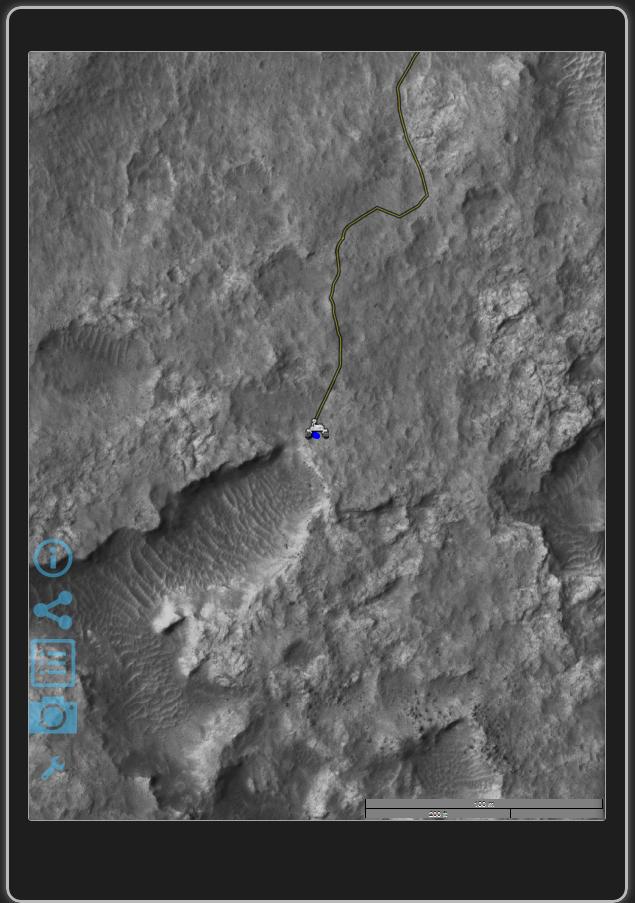
現在の位置は、火星偵察オービターのハイリスカメラからの画像から作られた高解像度(0.25メートル/ピクセル)マップに表示されます。マップはズームしてタッチジェスチャーでドラッグできます。スケールバーは、ズームレベルで距離スケールを示します。
着陸地点から最後の報告された位置までのローバーのトラックは、マップに示されています。ローバーの位置と追跡情報は、毎日約2回更新されます。
リンクは、ミッション内のすべてのドライブのリストと、それらのドライブのマップと、ローバーのカメラが撮影した最新の画像とともにWebページに提供されます。
©2014 Joe Knapp [email protected]
NASA/NAIFのローバーポジションデータ
HIRISEによる高解像度の火星画像(NASA/JPL/アリゾナ大学/マリン宇宙科学システム)
火星偵察オービターCTXおよび以前の火星オービターによる低解像度画像
Maptiler/Gdal2tiles、Klokan Petr Pridal、Gdal&OsgeoのOpenLayersタイル
v1.3:
アプリがすでに開いている場合、新しいドライブの更新トラック
 Download(4.86MB)
Download(4.86MB)